STMicroelectronics UM2193 MotionAR ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ
ਜਾਣ-ਪਛਾਣ
ਮੋਸ਼ਨ AR X-CUBE-MEMS1 ਸੌਫਟਵੇਅਰ ਦਾ ਇੱਕ ਮਿਡਲਵੇਅਰ ਲਾਇਬ੍ਰੇਰੀ ਹਿੱਸਾ ਹੈ ਅਤੇ STM32 'ਤੇ ਚੱਲਦਾ ਹੈ। ਇਹ ਉਪਭੋਗਤਾ ਦੁਆਰਾ ਕੀਤੀ ਗਤੀਵਿਧੀ ਦੀ ਕਿਸਮ ਬਾਰੇ ਅਸਲ-ਸਮੇਂ ਦੀ ਜਾਣਕਾਰੀ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ। ਇਹ ਹੇਠ ਲਿਖੀਆਂ ਗਤੀਵਿਧੀਆਂ ਨੂੰ ਵੱਖ ਕਰਨ ਦੇ ਯੋਗ ਹੈ: ਸਟੇਸ਼ਨਰੀ, ਪੈਦਲ, ਤੇਜ਼ ਸੈਰ, ਜੌਗਿੰਗ, ਬਾਈਕਿੰਗ, ਡ੍ਰਾਈਵਿੰਗ।
ਇਹ ਲਾਇਬ੍ਰੇਰੀ ਸਿਰਫ਼ ST MEMS ਨਾਲ ਕੰਮ ਕਰਨ ਲਈ ਹੈ।
ਐਲਗੋਰਿਦਮ ਸਥਿਰ ਲਾਇਬ੍ਰੇਰੀ ਫਾਰਮੈਟ ਵਿੱਚ ਪ੍ਰਦਾਨ ਕੀਤਾ ਗਿਆ ਹੈ ਅਤੇ ਇਸਨੂੰ ARM® Cortex®-M32, ARM® Cortex®-M3, ARM® Cortex®-M33 ਜਾਂ ARM® Cortex®-M4 ਆਰਕੀਟੈਕਚਰ ਦੇ ਅਧਾਰ ਤੇ STM7 ਮਾਈਕ੍ਰੋਕੰਟਰੋਲਰਸ 'ਤੇ ਵਰਤਣ ਲਈ ਤਿਆਰ ਕੀਤਾ ਗਿਆ ਹੈ।
ਇਹ STM32Cube ਸੌਫਟਵੇਅਰ ਤਕਨਾਲੋਜੀ ਦੇ ਸਿਖਰ 'ਤੇ ਬਣਾਇਆ ਗਿਆ ਹੈ ਜੋ ਵੱਖ-ਵੱਖ STM32 ਮਾਈਕ੍ਰੋਕੰਟਰੋਲਰਸ ਵਿੱਚ ਪੋਰਟੇਬਿਲਟੀ ਨੂੰ ਸੌਖਾ ਬਣਾਉਂਦਾ ਹੈ।
ਸਾਫਟਵੇਅਰ ਐੱਸampਇੱਕ NUCLEO-F01RE, NUCLEO-L3RE ਜਾਂ NUCLEO-U4ZI-Q ਵਿਕਾਸ ਬੋਰਡ 'ਤੇ X-NUCLEO-IKS1A401 ਜਾਂ X-NUCLEO-IKS152A575 ਵਿਸਤਾਰ ਬੋਰਡ 'ਤੇ ਚੱਲ ਰਿਹਾ le ਲਾਗੂਕਰਨ।
ਸੰਖੇਪ ਅਤੇ ਸੰਖੇਪ ਰੂਪ
ਸਾਰਣੀ 1. ਸੰਖੇਪ ਸ਼ਬਦਾਂ ਦੀ ਸੂਚੀ
| ਸੰਖੇਪ | ਵਰਣਨ |
| API | ਐਪਲੀਕੇਸ਼ਨ ਪ੍ਰੋਗਰਾਮਿੰਗ ਇੰਟਰਫੇਸ |
| ਬਸਪਾ | ਬੋਰਡ ਸਹਾਇਤਾ ਪੈਕੇਜ |
| GUI | ਗ੍ਰਾਫਿਕਲ ਯੂਜ਼ਰ ਇੰਟਰਫੇਸ |
| ਐੱਚ.ਏ.ਐੱਲ | ਹਾਰਡਵੇਅਰ ਐਬਸਟਰੈਕਸ਼ਨ ਲੇਅਰ |
| IDE | ਏਕੀਕ੍ਰਿਤ ਵਿਕਾਸ ਵਾਤਾਵਰਣ |
X-CUBE-MEMS1 ਸੌਫਟਵੇਅਰ ਵਿਸਤਾਰ ਵਿੱਚ ਮੋਸ਼ਨ AR ਮਿਡਲਵੇਅਰ ਲਾਇਬ੍ਰੇਰੀ
ਮੋਸ਼ਨ AR ਵੱਧview
ਮੋਸ਼ਨ AR ਲਾਇਬ੍ਰੇਰੀ X-CUBE-MEMS1 ਸੌਫਟਵੇਅਰ ਦੀ ਕਾਰਜਕੁਸ਼ਲਤਾ ਦਾ ਵਿਸਤਾਰ ਕਰਦੀ ਹੈ।
ਲਾਇਬ੍ਰੇਰੀ ਐਕਸੀਲੇਰੋਮੀਟਰ ਤੋਂ ਡੇਟਾ ਪ੍ਰਾਪਤ ਕਰਦੀ ਹੈ ਅਤੇ ਉਪਭੋਗਤਾ ਦੁਆਰਾ ਕੀਤੀ ਗਤੀਵਿਧੀ ਦੀ ਕਿਸਮ ਬਾਰੇ ਜਾਣਕਾਰੀ ਪ੍ਰਦਾਨ ਕਰਦੀ ਹੈ।
ਲਾਇਬ੍ਰੇਰੀ ਸਿਰਫ਼ ST MEMS ਲਈ ਤਿਆਰ ਕੀਤੀ ਗਈ ਹੈ। ਹੋਰ MEMS ਸੈਂਸਰਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ ਕਾਰਜਕੁਸ਼ਲਤਾ ਅਤੇ ਪ੍ਰਦਰਸ਼ਨ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਨਹੀਂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਅਤੇ ਦਸਤਾਵੇਜ਼ ਵਿੱਚ ਵਰਣਨ ਕੀਤੇ ਗਏ ਸ਼ਬਦਾਂ ਤੋਂ ਮਹੱਤਵਪੂਰਨ ਤੌਰ 'ਤੇ ਵੱਖਰਾ ਹੋ ਸਕਦਾ ਹੈ।
Sample ਲਾਗੂਕਰਨ X-NUCLEO-IKS01A3 ਜਾਂ X-NUCLEO-IKS4A1 ਵਿਸਤਾਰ ਬੋਰਡਾਂ 'ਤੇ ਉਪਲਬਧ ਹੈ, ਜੋ ਕਿ ਇੱਕ NUCLEO-F401RE, NUCLEO-L152RE ਜਾਂ NUCLEO-U575ZI-Q ਵਿਕਾਸ ਬੋਰਡ 'ਤੇ ਮਾਊਂਟ ਹੈ।
ਮੋਸ਼ਨ AR ਲਾਇਬ੍ਰੇਰੀ
Motion AR APIs ਦੇ ਫੰਕਸ਼ਨਾਂ ਅਤੇ ਮਾਪਦੰਡਾਂ ਦਾ ਪੂਰੀ ਤਰ੍ਹਾਂ ਵਰਣਨ ਕਰਨ ਵਾਲੀ ਤਕਨੀਕੀ ਜਾਣਕਾਰੀ MotionAR_Package.chm ਸੰਕਲਿਤ HTML ਵਿੱਚ ਲੱਭੀ ਜਾ ਸਕਦੀ ਹੈ। file ਦਸਤਾਵੇਜ਼ ਫੋਲਡਰ ਵਿੱਚ ਸਥਿਤ.
ਮੋਸ਼ਨ AR ਲਾਇਬ੍ਰੇਰੀ ਵਰਣਨ
- ਮੋਸ਼ਨ ਏਆਰ ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ ਐਕਸੀਲੇਰੋਮੀਟਰ ਤੋਂ ਪ੍ਰਾਪਤ ਕੀਤੇ ਡੇਟਾ ਦਾ ਪ੍ਰਬੰਧਨ ਕਰਦੀ ਹੈ; ਇਹ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ:
- ਹੇਠ ਲਿਖੀਆਂ ਗਤੀਵਿਧੀਆਂ ਨੂੰ ਵੱਖ ਕਰਨ ਦੀ ਸੰਭਾਵਨਾ: ਸਥਿਰ, ਸੈਰ, ਤੇਜ਼ ਸੈਰ, ਜੌਗਿੰਗ, ਬਾਈਕਿੰਗ, ਡ੍ਰਾਈਵਿੰਗ
- ਸਿਰਫ ਐਕਸੀਲੇਰੋਮੀਟਰ ਡੇਟਾ ਦੇ ਅਧਾਰ ਤੇ ਮਾਨਤਾ
- ਲੋੜੀਂਦਾ ਐਕਸਲੇਰੋਮੀਟਰ ਡਾਟਾ sampਲਿੰਗ ਬਾਰੰਬਾਰਤਾ: 16 Hz
- ਸਰੋਤ ਲੋੜਾਂ:
- Cortex-M3: 8.5 kB ਕੋਡ ਅਤੇ 1.4 kB ਡਾਟਾ ਮੈਮੋਰੀ
- Cortex-M33: 7.8 kB ਕੋਡ ਅਤੇ 1.4 kB ਡਾਟਾ ਮੈਮੋਰੀ
- Cortex-M4: 7.9 kB ਕੋਡ ਅਤੇ 1.4 kB ਡਾਟਾ ਮੈਮੋਰੀ
- Cortex-M7: 8.1 kB ਕੋਡ ਅਤੇ 1.4 kB ਡਾਟਾ ਮੈਮੋਰੀ
- ARM Cortex-M3, Cortex-M33, Cortex-M4 ਅਤੇ Cortex-M7 ਆਰਕੀਟੈਕਚਰ ਲਈ ਉਪਲਬਧ
MotionAR APIs
MotionAR API ਹਨ:
- uint8_t MotionAR_GetLibVersion(char *ਵਰਜਨ)
- ਲਾਇਬ੍ਰੇਰੀ ਦੇ ਸੰਸਕਰਣ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਦਾ ਹੈ
- *ਵਰਜਨ 35 ਅੱਖਰਾਂ ਦੀ ਇੱਕ ਐਰੇ ਲਈ ਇੱਕ ਪੁਆਇੰਟਰ ਹੈ
- ਵਰਜਨ ਸਤਰ ਵਿੱਚ ਅੱਖਰਾਂ ਦੀ ਸੰਖਿਆ ਵਾਪਸ ਕਰਦਾ ਹੈ
- void MotionAR_Initialize(void)
- MotionAR ਲਾਇਬ੍ਰੇਰੀ ਸ਼ੁਰੂਆਤੀ ਅਤੇ ਅੰਦਰੂਨੀ ਵਿਧੀ ਦਾ ਸੈੱਟਅੱਪ ਕਰਦਾ ਹੈ
- STM32 ਮਾਈਕ੍ਰੋਕੰਟਰੋਲਰ ਵਿੱਚ CRC ਮੋਡੀਊਲ (RCC ਪੈਰੀਫਿਰਲ ਕਲਾਕ ਇਨੇਬਲ ਰਜਿਸਟਰ ਵਿੱਚ) ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ
ਲਾਇਬ੍ਰੇਰੀ ਦੀ ਵਰਤੋਂ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਸਮਰੱਥ ਹੈ
ਨੋਟ: ਐਕਸਲੇਰੋਮੀਟਰ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਲਾਇਬ੍ਰੇਰੀ ਦੀ ਵਰਤੋਂ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਇਸ ਫੰਕਸ਼ਨ ਨੂੰ ਕਾਲ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ।
- void MotionAR_Reset(void)
- ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਐਲਗੋਰਿਦਮ ਨੂੰ ਰੀਸੈੱਟ ਕਰਦਾ ਹੈ
- void MotionAR_Update(MAR_input_t *data_in, MAR_output_t *data_out, int64_t
ਟਾਈਮਸਟamp)- ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਐਲਗੋਰਿਦਮ ਨੂੰ ਚਲਾਉਂਦਾ ਹੈ
- *data_in ਪੈਰਾਮੀਟਰ ਇਨਪੁਟ ਡੇਟਾ ਵਾਲੇ ਢਾਂਚੇ ਲਈ ਇੱਕ ਪੁਆਇੰਟਰ ਹੈ
- ਬਣਤਰ ਦੀ ਕਿਸਮ MAR_input_t ਲਈ ਪੈਰਾਮੀਟਰ ਹਨ:
- acc_x g ਵਿੱਚ X ਧੁਰੇ ਵਿੱਚ ਐਕਸੀਲੇਰੋਮੀਟਰ ਸੈਂਸਰ ਮੁੱਲ ਹੈ
- acc_y g ਵਿੱਚ Y ਧੁਰੇ ਵਿੱਚ ਐਕਸੀਲੇਰੋਮੀਟਰ ਸੈਂਸਰ ਮੁੱਲ ਹੈ
- acc_z g ਵਿੱਚ Z ਐਕਸਿਸ ਵਿੱਚ ਐਕਸੀਲੇਰੋਮੀਟਰ ਸੈਂਸਰ ਮੁੱਲ ਹੈ
- *data_out ਪੈਰਾਮੀਟਰ ਹੇਠ ਲਿਖੀਆਂ ਆਈਟਮਾਂ ਦੇ ਨਾਲ enum ਲਈ ਇੱਕ ਪੁਆਇੰਟਰ ਹੈ:
- MAR_NOACTIVITY = 0
- MAR_STATIONARY = 1
- ਮਾਰ_ਚਲ = ੨
- MAR_FASTWALKING = 3
- ਮਾਰ_ਜੋਗ = 4
- MAR_BIKING = 5
- ਮਾਰ_ਡਰਾਈਵਿੰਗ = 6
- ਟਾਈਮਸਟamp ਅਸਲ s ਲਈ ਇੱਕ ਅਨੁਸਾਰੀ ਸਮਾਂ ਹੈampms ਵਿੱਚ le
- void MotionAR_ Set Orientation_ Acc(const char *acc_ ਸਥਿਤੀ)
- ਐਕਸਲੇਰੋਮੀਟਰ ਡਾਟਾ ਸਥਿਤੀ ਸੈੱਟ ਕਰਦਾ ਹੈ
- ਸੰਰਚਨਾ ਆਮ ਤੌਰ 'ਤੇ ਮੋਸ਼ਨ AR_ ਸ਼ੁਰੂਆਤੀ ਫੰਕਸ਼ਨ ਕਾਲ ਦੇ ਤੁਰੰਤ ਬਾਅਦ ਕੀਤੀ ਜਾਂਦੀ ਹੈ
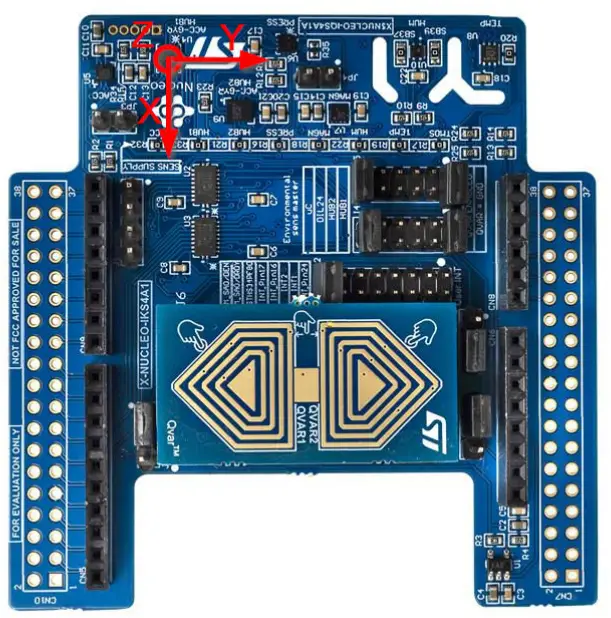
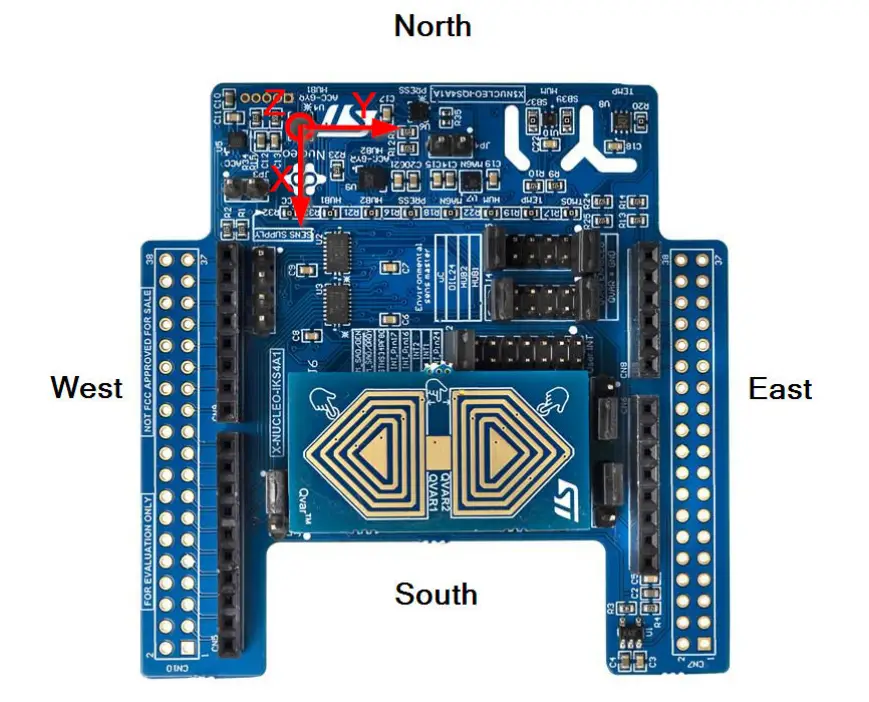
- *ਐਕਸੀ_ ਓਰੀਐਂਟੇਸ਼ਨ ਪੈਰਾਮੀਟਰ ਐਕਸੀਲੇਰੋਮੀਟਰ ਡੇਟਾ ਆਉਟਪੁੱਟ ਲਈ ਵਰਤੇ ਗਏ ਸੰਦਰਭ ਫਰੇਮ ਦੇ ਹਰੇਕ ਸਕਾਰਾਤਮਕ ਸਥਿਤੀ ਦੀ ਦਿਸ਼ਾ ਨੂੰ ਦਰਸਾਉਣ ਵਾਲੇ ਤਿੰਨ ਅੱਖਰਾਂ ਦੀ ਇੱਕ ਸਤਰ ਦਾ ਸੰਕੇਤਕ ਹੈ, ਕ੍ਰਮ x, y, z ਵਿੱਚ। ਵੈਧ ਮੁੱਲ ਹਨ: n (ਉੱਤਰ) ਜਾਂ s (ਦੱਖਣੀ), w (ਪੱਛਮ) ਜਾਂ e (ਪੂਰਬ), u (ਉੱਪਰ) ਜਾਂ d (ਹੇਠਾਂ)
- ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਦਿੱਤੇ ਚਿੱਤਰ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ, X-NUCLEO-IKS4A1 ਐਕਸੀਲੇਰੋਮੀਟਰ ਸੈਂਸਰ ਵਿੱਚ ਇੱਕ SEU (x-ਦੱਖਣੀ, y-ਪੂਰਬ, z-Up) ਹੈ, ਇਸਲਈ ਸਤਰ ਹੈ: "seu"।
ਚਿੱਤਰ 1. ਸੈਂਸਰ ਸਥਿਤੀ ਸਾਬਕਾample
API ਫਲੋ ਚਾਰ
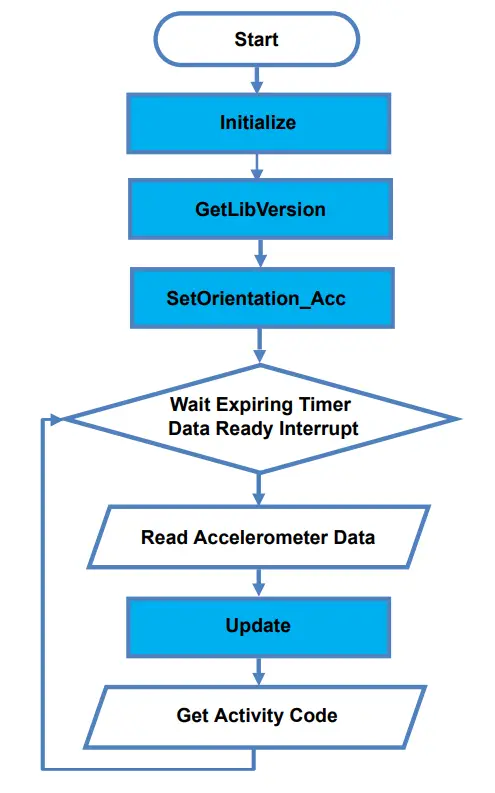
ਚਿੱਤਰ 2. ਮੋਸ਼ਨ AR API ਤਰਕ ਕ੍ਰਮ
ਡੈਮੋ ਕੋਡ
ਹੇਠਾਂ ਦਿੱਤਾ ਪ੍ਰਦਰਸ਼ਨ ਕੋਡ ਐਕਸੀਲੇਰੋਮੀਟਰ ਸੈਂਸਰ ਤੋਂ ਡਾਟਾ ਪੜ੍ਹਦਾ ਹੈ ਅਤੇ ਗਤੀਵਿਧੀ ਕੋਡ ਪ੍ਰਾਪਤ ਕਰਦਾ ਹੈ
[…] # ਪਰਿਭਾਸ਼ਿਤ VERSION_STR_LENG 35 […] /*** ਸ਼ੁਰੂਆਤੀ ***/ char lib_version[VERSION_STR_LENG]; char acc_orientation[] = "seu"; /* ਗਤੀਵਿਧੀ ਮਾਨਤਾ API ਸ਼ੁਰੂਆਤੀ ਫੰਕਸ਼ਨ */ MotionAR_Initialize(); /* ਵਿਕਲਪਿਕ: ਸੰਸਕਰਣ ਪ੍ਰਾਪਤ ਕਰੋ */ MotionAR_GetLibVersion(lib_version); /* ਐਕਸਲੇਰੋਮੀਟਰ ਓਰੀਐਂਟੇਸ਼ਨ ਸੈੱਟ ਕਰੋ */ MotionAR_SetOrientation_Acc(acc_orientation); […] /*** ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਐਲਗੋਰਿਦਮ ਦੀ ਵਰਤੋਂ ਕਰਨਾ ***/ ਟਾਈਮਰ_ ਜਾਂ_ ਡੇਟਾ ਰੇਟ_ ਇੰਟਰੱਪਟ_ ਹੈਂਡਲਰ () {
MAR_input_t ਡੇਟਾ_ਇਨ; ਮਾਰ_ਆਊਟਪੁੱਟ_ਟੀ ਗਤੀਵਿਧੀ; /* g */ MEMS_Read_AccValue(&data_in.acc_x, &data_in.acc_y, &data_in.acc_z) ਵਿੱਚ ਪ੍ਰਵੇਗ X/Y/Z ਪ੍ਰਾਪਤ ਕਰੋ; /* ਮੌਜੂਦਾ ਸਮਾਂ ms ਵਿੱਚ ਪ੍ਰਾਪਤ ਕਰੋ */ TIMER_Get_TimeValue(×tamp_ms); /* ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਐਲਗੋਰਿਦਮ ਅੱਪਡੇਟ */ MotionAR_Update(data_in, data_out, timestamp_ms); }
ਐਲਗੋਰਿਦਮ ਪ੍ਰਦਰਸ਼ਨ
ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਐਲਗੋਰਿਦਮ ਸਿਰਫ ਐਕਸੀਲੇਰੋਮੀਟਰ ਤੋਂ ਡੇਟਾ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ ਅਤੇ ਬਿਜਲੀ ਦੀ ਖਪਤ ਨੂੰ ਘਟਾਉਣ ਲਈ ਘੱਟ ਬਾਰੰਬਾਰਤਾ (16 Hz) 'ਤੇ ਚੱਲਦਾ ਹੈ।
ਸਾਰਣੀ 2. ਐਲਗੋਰਿਦਮ ਪ੍ਰਦਰਸ਼ਨ
| ਗਤੀਵਿਧੀ | ਖੋਜ ਸੰਭਾਵਨਾ (ਆਮ)(1) | ਵਧੀਆ ਪ੍ਰਦਰਸ਼ਨ | ਸੰਵੇਦਨਸ਼ੀਲ | ਅਹੁਦੇ ਸੰਭਾਲਦੇ ਹਨ |
| ਸਟੇਸ਼ਨਰੀ | 92.27% | ਹੱਥ ਵਿੱਚ ਫੜਨਾ ਅਤੇ ਭਾਰੀ ਟੈਕਸਟਿੰਗ | ਸਾਰੇ: ਟਰਾਊਜ਼ਰ ਦੀ ਜੇਬ, ਕਮੀਜ਼ ਦੀ ਜੇਬ, ਪਿਛਲੀ ਜੇਬ, ਸਿਰ ਦੇ ਨੇੜੇ, ਆਦਿ। | |
| ਤੁਰਨਾ | 99.44% | ਸਟੈਪ ਰੇਟ ≥ 1.4 ਸਟੈਪ/ਸ | ਸਟੈਪ ਰੇਟ ≤ 1.2 ਸਟੈਪ/ਸ | ਸਾਰੇ |
| ਤੇਜ਼ ਤੁਰਨਾ | 95.94% | ਸਟੈਪ ਰੇਟ ≥ 2.0 ਸਟੈਪ/ਸ | ਸਾਰੇ | |
| ਜਾਗਿੰਗ | 98.49% | ਸਟੈਪ ਰੇਟ ≥ 2.2 ਸਟੈਪ/ਸ | ਮਿਆਦ < 1 ਮਿੰਟ; ਗਤੀ <8 ਕਿਮੀ/ਘੰਟਾ | ਟਰਾਊਜ਼ਰ ਦੀ ਜੇਬ, ਬਾਂਹ ਦਾ ਝੂਲਾ, ਹੱਥ ਵਿੱਚ |
| ਬਾਈਕਿੰਗ | 91.93% | ਬਾਹਰੀ ਗਤੀ ≥11 ਕਿਲੋਮੀਟਰ/ਘੰਟਾ | ਯਾਤਰੀ ਸੀਟ, ਦਸਤਾਨੇ ਵਾਲਾ ਡੱਬਾ | ਬੈਕਪੈਕ, ਕਮੀਜ਼ ਜੇਬ, ਟਰਾਊਜ਼ਰ ਜੇਬ |
| ਗੱਡੀ ਚਲਾਉਣਾ | 78.65% | ਸਪੀਡ ≥ 48 ਕਿਲੋਮੀਟਰ ਪ੍ਰਤੀ ਘੰਟਾ | ਯਾਤਰੀ ਸੀਟ, ਦਸਤਾਨੇ ਵਾਲਾ ਡੱਬਾ | ਕੱਪ ਧਾਰਕ, ਡੈਸ਼ ਬੋਰਡ, ਕਮੀਜ਼ ਦੀ ਜੇਬ, ਟਰਾਊਜ਼ਰ ਦੀ ਜੇਬ |
- ਆਮ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੀ ਗਾਰੰਟੀ ਨਹੀਂ ਹੈ
ਸਾਰਣੀ 3. Cortex-M4 ਅਤੇ Cortex-M3: ਬੀਤਿਆ ਸਮਾਂ (µs) ਐਲਗੋਰਿਦਮ
| Cortex-M4 STM32F401RE 84 MHz 'ਤੇ | Cortex-M3 STM32L152RE 32 MHz 'ਤੇ | ||||
| ਘੱਟੋ-ਘੱਟ | ਔਸਤ | ਅਧਿਕਤਮ | ਘੱਟੋ-ਘੱਟ | ਔਸਤ | ਅਧਿਕਤਮ |
| 2 | 6 | 153 | 8 | 130 | 4883 |
ਸਾਰਣੀ 4. Cortex-M33 ਅਤੇ Cortex-M7: ਬੀਤਿਆ ਸਮਾਂ (μs) ਐਲਗੋਰਿਦਮ
| Cortex-M33 STM32U575ZI-Q 160 MHz 'ਤੇ | Cortex-M7 STM32F767ZI 96 MHz 'ਤੇ | ||||
| ਘੱਟੋ-ਘੱਟ | ਔਸਤ | ਅਧਿਕਤਮ | ਘੱਟੋ-ਘੱਟ | ਔਸਤ | ਅਧਿਕਤਮ |
| < 1 | 2 | 74 | 5 | 9 | 145 |
Sampਲੇ ਐਪਲੀਕੇਸ਼ਨ
MotionAR ਮਿਡਲਵੇਅਰ ਨੂੰ ਉਪਭੋਗਤਾ ਐਪਲੀਕੇਸ਼ਨ ਬਣਾਉਣ ਲਈ ਆਸਾਨੀ ਨਾਲ ਹੇਰਾਫੇਰੀ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ; ਜਿਵੇਂample ਐਪਲੀਕੇਸ਼ਨ ਨੂੰ ਐਪਲੀਕੇਸ਼ਨ ਫੋਲਡਰ ਵਿੱਚ ਪ੍ਰਦਾਨ ਕੀਤਾ ਗਿਆ ਹੈ।
ਇਹ ਇੱਕ NUCLEO-F401RE, NUCLEO-L152RE ਜਾਂ NUCLEO-U575ZI-Q ਵਿਕਾਸ ਬੋਰਡ 'ਤੇ ਚਲਾਉਣ ਲਈ ਤਿਆਰ ਕੀਤਾ ਗਿਆ ਹੈ ਜੋ ਇੱਕ X-NUCLEO-IKS01A3 ਜਾਂ X-NUCLEO-IKS4A1 ਵਿਸਤਾਰ ਬੋਰਡ ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ।
ਐਪਲੀਕੇਸ਼ਨ ਅਸਲ-ਸਮੇਂ ਵਿੱਚ ਕੀਤੀਆਂ ਗਤੀਵਿਧੀਆਂ ਨੂੰ ਮਾਨਤਾ ਦਿੰਦੀ ਹੈ। ਡੇਟਾ ਨੂੰ ਇੱਕ GUI ਦੁਆਰਾ ਪ੍ਰਦਰਸ਼ਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਐਲਗੋਰਿਦਮ ਸਟੇਸ਼ਨਰੀ, ਪੈਦਲ, ਤੇਜ਼ ਸੈਰ, ਜੌਗਿੰਗ, ਬਾਈਕ ਸਵਾਰੀ ਅਤੇ ਡ੍ਰਾਈਵਿੰਗ ਗਤੀਵਿਧੀਆਂ ਨੂੰ ਮਾਨਤਾ ਦਿੰਦਾ ਹੈ। ਰੀਅਲ-ਟਾਈਮ ਡੇਟਾ ਦੀ ਨਿਗਰਾਨੀ ਕਰਨ ਲਈ USB ਕੇਬਲ ਕਨੈਕਸ਼ਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਬੋਰਡ ਨੂੰ USB ਕੁਨੈਕਸ਼ਨ ਰਾਹੀਂ PC ਦੁਆਰਾ ਸੰਚਾਲਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਹ ਉਪਭੋਗਤਾ ਨੂੰ ਖੋਜੀ ਗਈ ਗਤੀਵਿਧੀ, ਐਕਸੀਲੇਰੋਮੀਟਰ ਡੇਟਾ, ਸਮਾਂ ਸਟੰਟ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਨ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈamp ਅਤੇ ਅੰਤ ਵਿੱਚ ਹੋਰ ਸੈਂਸਰ ਡੇਟਾ, ਰੀਅਲ-ਟਾਈਮ ਵਿੱਚ, MEMS-Studio GUI ਐਪਲੀਕੇਸ਼ਨ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ।
MEMS-ਸਟੂਡੀਓ ਐਪਲੀਕੇਸ਼ਨ
Sample ਐਪਲੀਕੇਸ਼ਨ MEMS-Studio GUI ਐਪਲੀਕੇਸ਼ਨ ਦੀ ਵਰਤੋਂ ਕਰਦੀ ਹੈ, ਜਿਸ ਤੋਂ ਡਾਊਨਲੋਡ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ www.st.com.
ਕਦਮ 1. ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਲੋੜੀਂਦੇ ਡ੍ਰਾਈਵਰ ਸਥਾਪਿਤ ਕੀਤੇ ਗਏ ਹਨ ਅਤੇ ਢੁਕਵੇਂ ਵਿਸਤਾਰ ਬੋਰਡ ਵਾਲਾ STM32 ਨਿਊਕਲੀਓ ਬੋਰਡ ਪੀਸੀ ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ।
ਕਦਮ 2. ਮੁੱਖ ਐਪਲੀਕੇਸ਼ਨ ਵਿੰਡੋ ਨੂੰ ਖੋਲ੍ਹਣ ਲਈ MEMS-Studio ਐਪਲੀਕੇਸ਼ਨ ਨੂੰ ਲਾਂਚ ਕਰੋ।
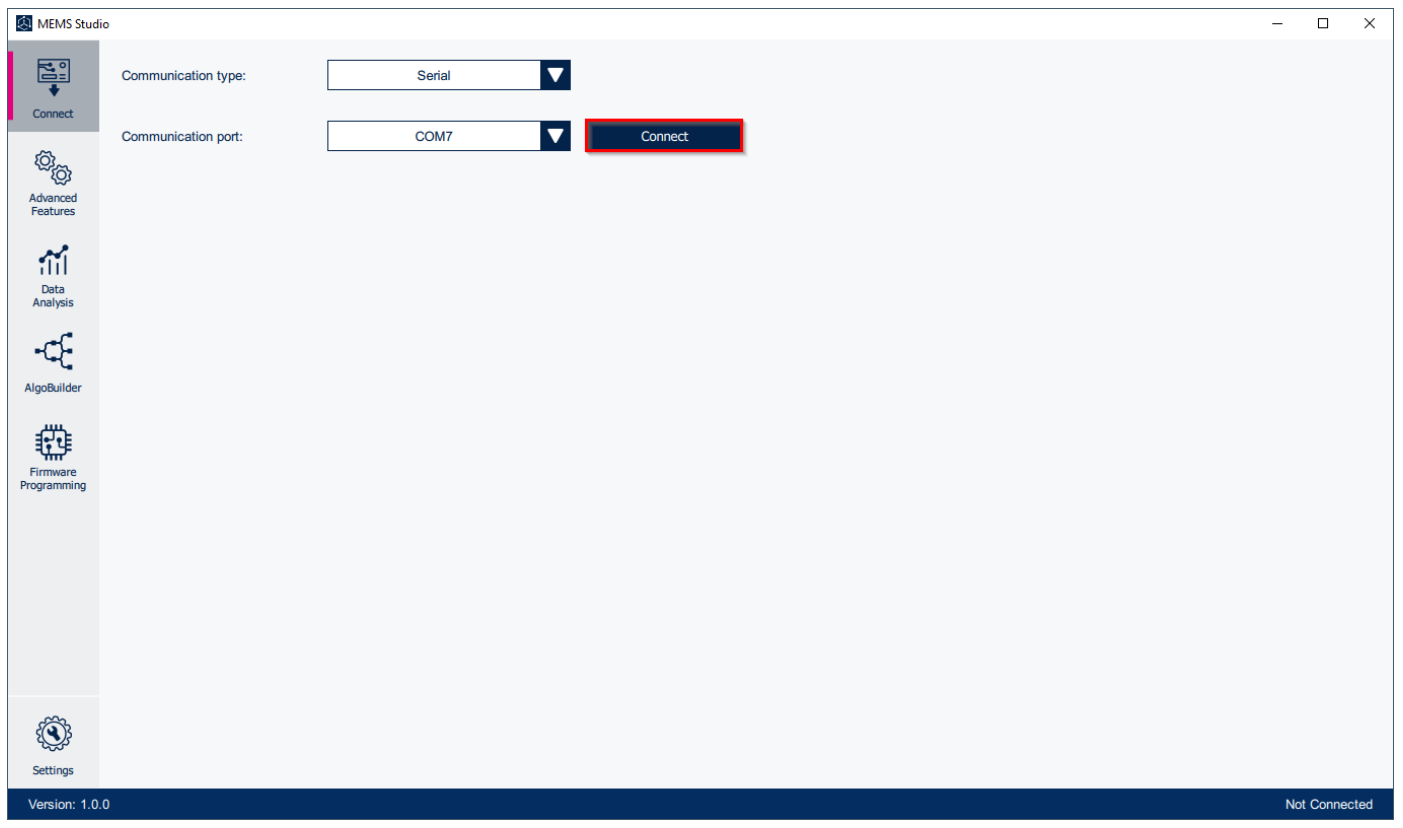
ਜੇਕਰ ਸਮਰਥਿਤ ਫਰਮਵੇਅਰ ਵਾਲਾ ਇੱਕ STM32 ਨਿਊਕਲੀਓ ਬੋਰਡ ਪੀਸੀ ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ, ਤਾਂ ਇਹ ਆਪਣੇ ਆਪ ਹੀ ਢੁਕਵੇਂ COM ਪੋਰਟ ਦਾ ਪਤਾ ਲਗਾਇਆ ਜਾਂਦਾ ਹੈ। ਇਸ ਪੋਰਟ ਨੂੰ ਖੋਲ੍ਹਣ ਲਈ ਕਨੈਕਟ ਬਟਨ ਦਬਾਓ।
ਚਿੱਤਰ 3. MEMS-ਸਟੂਡੀਓ – ਕਨੈਕਟ ਕਰੋ
ਕਦਮ 3. ਸਮਰਥਿਤ ਫਰਮਵੇਅਰ ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ ਟੈਬ ਦੇ ਨਾਲ STM32 ਨਿਊਕਲੀਓ ਬੋਰਡ ਨਾਲ ਕਨੈਕਟ ਹੋਣ 'ਤੇ ਖੋਲ੍ਹਿਆ ਜਾਂਦਾ ਹੈ।
ਡਾਟਾ ਸਟ੍ਰੀਮਿੰਗ ਸ਼ੁਰੂ ਕਰਨ ਅਤੇ ਬੰਦ ਕਰਨ ਲਈ ਉਚਿਤ ਟੌਗਲ ਕਰੋ ![]() ਸ਼ੁਰੂ /
ਸ਼ੁਰੂ / ![]() ਬਾਹਰੀ ਵਰਟੀਕਲ ਟੂਲ ਬਾਰ 'ਤੇ ਸਟਾਪ ਬਟਨ।
ਬਾਹਰੀ ਵਰਟੀਕਲ ਟੂਲ ਬਾਰ 'ਤੇ ਸਟਾਪ ਬਟਨ।
ਕਨੈਕਟਡ ਸੈਂਸਰ ਤੋਂ ਆਉਣ ਵਾਲਾ ਡਾਟਾ ਹੋ ਸਕਦਾ ਹੈ viewਅੰਦਰੂਨੀ ਵਰਟੀਕਲ ਟੂਲ ਬਾਰ 'ਤੇ ਡਾਟਾ ਟੇਬਲ ਟੈਬ ਨੂੰ ਚੁਣਨਾ।
ਚਿੱਤਰ 4. MEMS-ਸਟੂਡੀਓ – ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ – ਡੇਟਾ ਟੇਬਲ
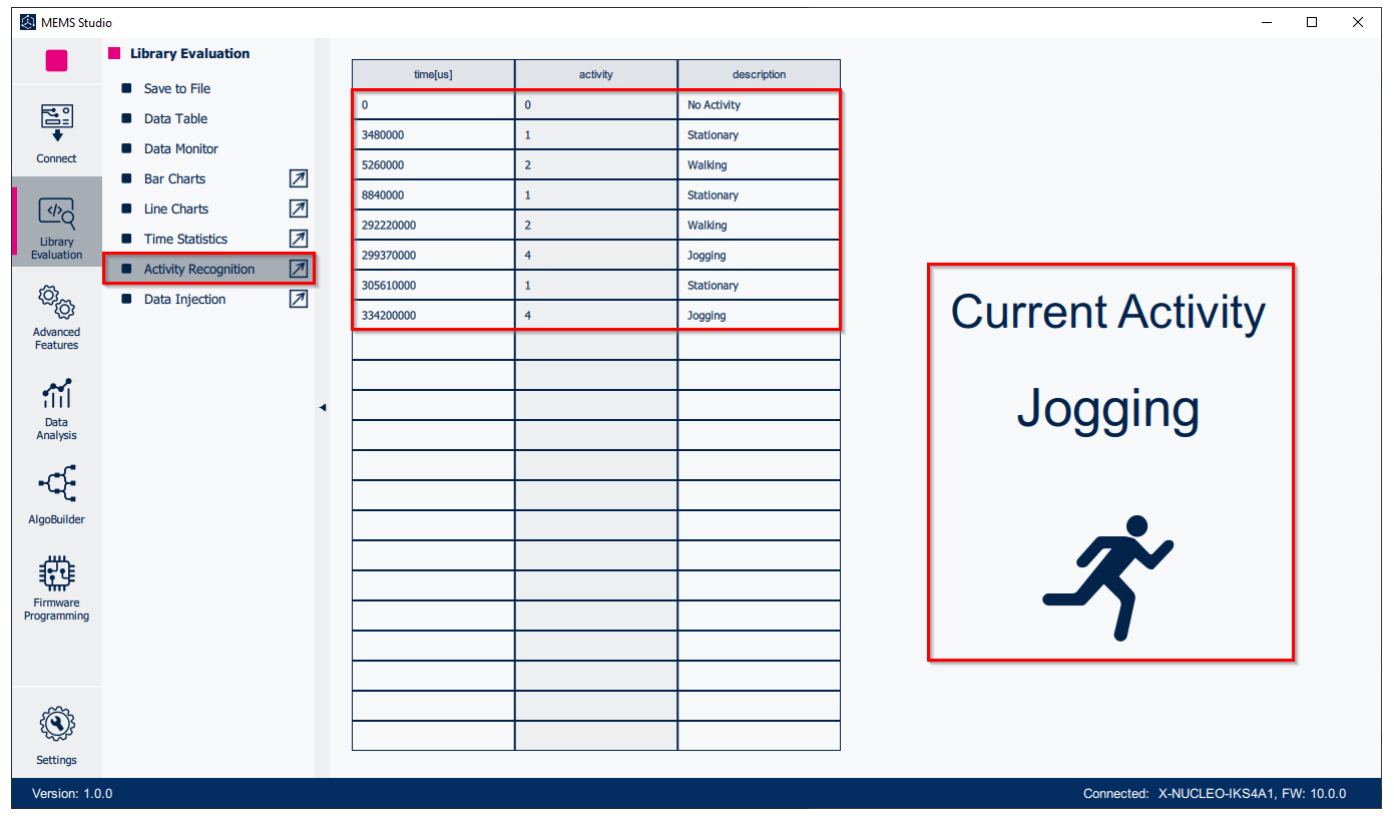
ਚਿੱਤਰ 5. MEMS-ਸਟੂਡੀਓ - ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ - ਗਤੀਵਿਧੀ ਮਾਨਤਾ
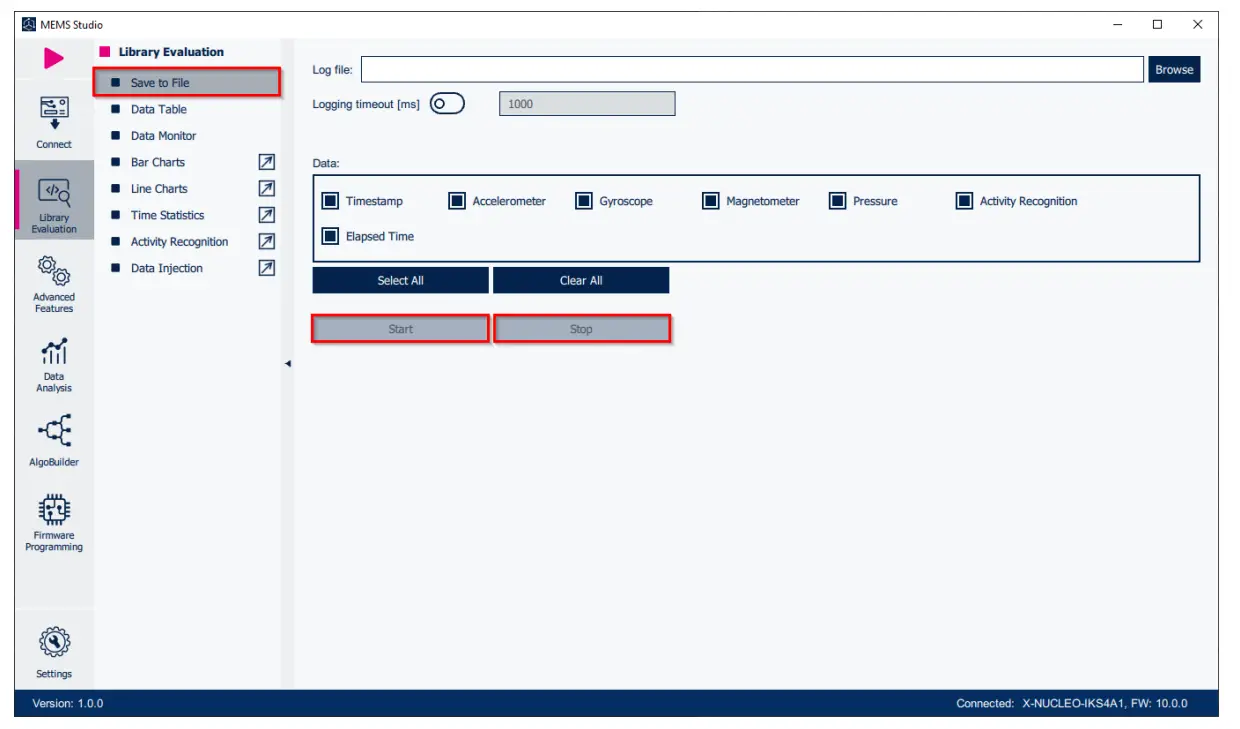
ਕਦਮ 5. 'ਤੇ ਸੇਵ ਚੁਣੋ File ਡਾਟਾ ਲੌਗਿੰਗ ਕੌਂਫਿਗਰੇਸ਼ਨ ਵਿੰਡੋ ਨੂੰ ਖੋਲ੍ਹਣ ਲਈ ਅੰਦਰੂਨੀ ਵਰਟੀਕਲ ਟੂਲ ਬਾਰ 'ਤੇ ਟੈਬ. ਲੌਗ ਕਰਨ ਲਈ ਸੇਵ ਕਰਨ ਲਈ ਕਿਹੜਾ ਸੈਂਸਰ ਅਤੇ ਗਤੀਵਿਧੀ ਡੇਟਾ ਚੁਣੋ file. ਤੁਸੀਂ ਸੰਬੰਧਿਤ ਸਟਾਰਟ/ਸਟਾਪ ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਸੇਵਿੰਗ ਸ਼ੁਰੂ ਜਾਂ ਬੰਦ ਕਰ ਸਕਦੇ ਹੋ।
ਚਿੱਤਰ 6. MEMS-ਸਟੂਡੀਓ – ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ – ਇਸ ਵਿੱਚ ਸੁਰੱਖਿਅਤ ਕਰੋ File
ਹਵਾਲੇ
ਹੇਠਾਂ ਦਿੱਤੇ ਸਾਰੇ ਸਰੋਤ ਮੁਫ਼ਤ ਵਿੱਚ ਉਪਲਬਧ ਹਨ www.st.com.
- UM1859: X-CUBE-MEMS1 ਮੋਸ਼ਨ MEMS ਅਤੇ STM32Cube ਲਈ ਵਾਤਾਵਰਨ ਸੈਂਸਰ ਸੌਫਟਵੇਅਰ ਵਿਸਤਾਰ ਨਾਲ ਸ਼ੁਰੂਆਤ ਕਰਨਾ
- UM1724: STM32 ਨਿਊਕਲੀਓ-64 ਬੋਰਡ (MB1136)
- UM3233: MEMS-ਸਟੂਡੀਓ ਨਾਲ ਸ਼ੁਰੂਆਤ ਕਰਨਾ
ਸੰਸ਼ੋਧਨ ਇਤਿਹਾਸ
ਸਾਰਣੀ 5. ਦਸਤਾਵੇਜ਼ ਸੰਸ਼ੋਧਨ ਇਤਿਹਾਸ
| ਮਿਤੀ | ਸੰਸਕਰਣ | ਤਬਦੀਲੀਆਂ |
| 10-ਅਪ੍ਰੈਲ-2017 | 1 | ਸ਼ੁਰੂਆਤੀ ਰੀਲੀਜ਼। |
| 26-ਜਨਵਰੀ-2018 | 2 | ਅਪਡੇਟ ਕੀਤਾ ਸੈਕਸ਼ਨ 3 ਐੱਸampਲੇ ਐਪਲੀਕੇਸ਼ਨ. NUCLEO-L152RE ਡਿਵੈਲਪਮੈਂਟ ਬੋਰਡ ਅਤੇ ਟੇਬਲ 3 ਦੇ ਹਵਾਲੇ ਸ਼ਾਮਲ ਕੀਤੇ ਗਏ। ਬੀਤਿਆ ਸਮਾਂ (μs) ਐਲਗੋਰਿਦਮ। |
| 19-ਮਾਰਚ-2018 | 3 | ਅੱਪਡੇਟ ਕੀਤੀ ਜਾਣ-ਪਛਾਣ, ਸੈਕਸ਼ਨ 2.1 ਮੋਸ਼ਨ AR ਓਵਰview ਅਤੇ ਸੈਕਸ਼ਨ 2.2.5 ਐਲਗੋਰਿਦਮ ਪ੍ਰਦਰਸ਼ਨ। |
| 14-ਫਰਵਰੀ-2019 | 4 | ਅੱਪਡੇਟ ਕੀਤਾ ਚਿੱਤਰ 1. ਸੈਂਸਰ ਓਰੀਐਂਟੇਸ਼ਨ ਸਾਬਕਾample, ਸਾਰਣੀ 3. ਬੀਤਿਆ ਸਮਾਂ (µs) ਐਲਗੋਰਿਦਮ ਅਤੇ ਚਿੱਤਰ 3. STM32 ਨਿਊਕਲੀਓ: LEDs, ਬਟਨ, ਜੰਪਰ। X-NUCLEO-IKS01A3 ਵਿਸਤਾਰ ਬੋਰਡ ਅਨੁਕੂਲਤਾ ਜਾਣਕਾਰੀ ਸ਼ਾਮਲ ਕੀਤੀ ਗਈ। |
| 20-ਮਾਰਚ-2019 | 5 | ਅੱਪਡੇਟ ਕੀਤਾ ਸੈਕਸ਼ਨ 2.2.2 ਮੋਸ਼ਨ AR API, ਚਿੱਤਰ 3. MEMS-ਸਟੂਡੀਓ – ਕਨੈਕਟ ਕਰੋ, ਚਿੱਤਰ 4. MEMS-ਸਟੂਡੀਓ – ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ – ਡੇਟਾ ਟੇਬਲ, ਚਿੱਤਰ 5. MEMS-ਸਟੂਡੀਓ – ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ – ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਅਤੇ ਚਿੱਤਰ-6. - ਲਾਇਬ੍ਰੇਰੀ ਮੁਲਾਂਕਣ - ਇਸ ਵਿੱਚ ਸੁਰੱਖਿਅਤ ਕਰੋ File. |
| 04-ਅਪ੍ਰੈਲ-2024 | 6 | ਅੱਪਡੇਟ ਕਰੋ ਭਾਗ ਜਾਣ-ਪਛਾਣ, ਸੈਕਸ਼ਨ 2.1: MotionAR ਓਵਰview, ਸੈਕਸ਼ਨ 2.2.1: MotionAR ਲਾਇਬ੍ਰੇਰੀ ਵਰਣਨ, MotionAR APIs, ਸੈਕਸ਼ਨ 2.2.4: ਡੈਮੋ ਕੋਡ, ਸੈਕਸ਼ਨ 2.2.5: ਐਲਗੋਰਿਦਮ ਪ੍ਰਦਰਸ਼ਨ, ਸੈਕਸ਼ਨ 3: ਸampਲੇ ਐਪਲੀਕੇਸ਼ਨ ਅਤੇ ਸੈਕਸ਼ਨ 4: MEMS-ਸਟੂਡੀਓ ਐਪਲੀਕੇਸ਼ਨ. |
ਜ਼ਰੂਰੀ ਸੂਚਨਾ – ਧਿਆਨ ਨਾਲ ਪੜ੍ਹੋ
STMicroelectronics NV ਅਤੇ ਇਸਦੀਆਂ ਸਹਾਇਕ ਕੰਪਨੀਆਂ ("ST") ਬਿਨਾਂ ਨੋਟਿਸ ਦੇ ਕਿਸੇ ਵੀ ਸਮੇਂ ST ਉਤਪਾਦਾਂ ਅਤੇ/ਜਾਂ ਇਸ ਦਸਤਾਵੇਜ਼ ਵਿੱਚ ਤਬਦੀਲੀਆਂ, ਸੁਧਾਰਾਂ, ਸੁਧਾਰਾਂ, ਸੋਧਾਂ, ਅਤੇ ਸੁਧਾਰ ਕਰਨ ਦਾ ਅਧਿਕਾਰ ਰਾਖਵਾਂ ਰੱਖਦੀਆਂ ਹਨ। ਖਰੀਦਦਾਰਾਂ ਨੂੰ ਆਰਡਰ ਦੇਣ ਤੋਂ ਪਹਿਲਾਂ ST ਉਤਪਾਦਾਂ ਬਾਰੇ ਨਵੀਨਤਮ ਸੰਬੰਧਿਤ ਜਾਣਕਾਰੀ ਪ੍ਰਾਪਤ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ। ST ਉਤਪਾਦ ਆਰਡਰ ਦੀ ਰਸੀਦ ਦੇ ਸਮੇਂ ST ਦੇ ਨਿਯਮਾਂ ਅਤੇ ਵਿਕਰੀ ਦੀਆਂ ਸ਼ਰਤਾਂ ਦੇ ਅਨੁਸਾਰ ਵੇਚੇ ਜਾਂਦੇ ਹਨ।
ਖਰੀਦਦਾਰ ST ਉਤਪਾਦਾਂ ਦੀ ਚੋਣ, ਚੋਣ ਅਤੇ ਵਰਤੋਂ ਲਈ ਪੂਰੀ ਤਰ੍ਹਾਂ ਜ਼ਿੰਮੇਵਾਰ ਹੁੰਦੇ ਹਨ ਅਤੇ ST ਐਪਲੀਕੇਸ਼ਨ ਸਹਾਇਤਾ ਜਾਂ ਖਰੀਦਦਾਰਾਂ ਦੇ ਉਤਪਾਦਾਂ ਦੇ ਡਿਜ਼ਾਈਨ ਲਈ ਕੋਈ ਜ਼ਿੰਮੇਵਾਰੀ ਨਹੀਂ ਮੰਨਦੀ।
ਇੱਥੇ ST ਦੁਆਰਾ ਕਿਸੇ ਵੀ ਬੌਧਿਕ ਸੰਪੱਤੀ ਦੇ ਅਧਿਕਾਰ ਨੂੰ ਕੋਈ ਲਾਇਸੈਂਸ, ਐਕਸਪ੍ਰੈਸ ਜਾਂ ਅਪ੍ਰਤੱਖ ਨਹੀਂ ਦਿੱਤਾ ਗਿਆ ਹੈ।
ਇੱਥੇ ਦਿੱਤੀ ਗਈ ਜਾਣਕਾਰੀ ਤੋਂ ਵੱਖ ਪ੍ਰਬੰਧਾਂ ਵਾਲੇ ST ਉਤਪਾਦਾਂ ਦੀ ਮੁੜ ਵਿਕਰੀ ਐਸਟੀ ਦੁਆਰਾ ਅਜਿਹੇ ਉਤਪਾਦ ਲਈ ਦਿੱਤੀ ਗਈ ਕਿਸੇ ਵੀ ਵਾਰੰਟੀ ਨੂੰ ਰੱਦ ਕਰ ਦੇਵੇਗੀ।
ST ਅਤੇ ST ਲੋਗੋ ST ਦੇ ਟ੍ਰੇਡਮਾਰਕ ਹਨ। ST ਟ੍ਰੇਡਮਾਰਕ ਬਾਰੇ ਵਾਧੂ ਜਾਣਕਾਰੀ ਲਈ, ਵੇਖੋ www.st.com/trademarks. ਹੋਰ ਸਾਰੇ ਉਤਪਾਦ ਜਾਂ ਸੇਵਾ ਦੇ ਨਾਮ ਉਹਨਾਂ ਦੇ ਸਬੰਧਤ ਮਾਲਕਾਂ ਦੀ ਸੰਪਤੀ ਹਨ।
ਇਸ ਦਸਤਾਵੇਜ਼ ਵਿਚਲੀ ਜਾਣਕਾਰੀ ਇਸ ਦਸਤਾਵੇਜ਼ ਦੇ ਕਿਸੇ ਵੀ ਪੁਰਾਣੇ ਸੰਸਕਰਣਾਂ ਵਿਚ ਪਹਿਲਾਂ ਦਿੱਤੀ ਗਈ ਜਾਣਕਾਰੀ ਨੂੰ ਬਦਲਦੀ ਹੈ ਅਤੇ ਬਦਲਦੀ ਹੈ।
© 2024 STMicroelectronics – ਸਾਰੇ ਅਧਿਕਾਰ ਰਾਖਵੇਂ ਹਨ

ਦਸਤਾਵੇਜ਼ / ਸਰੋਤ
 |
STMicroelectronics UM2193 MotionAR ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ [pdf] ਯੂਜ਼ਰ ਮੈਨੂਅਲ UM2193 MotionAR ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ, UM2193, MotionAR ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ, ਗਤੀਵਿਧੀ ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ, ਮਾਨਤਾ ਲਾਇਬ੍ਰੇਰੀ, ਲਾਇਬ੍ਰੇਰੀ |


